Docker 容器访问 IPv6 地址:踩坑与解决方案
最近搬家,家里的 Self-Host 服务由于限制无法通过公网 IPv4 访问,就改用 IPv6 + DDNS 的方式提供公网域名访问。
切换完成后,立即收到云服务器上 Uptime Kuma 的告警,显示无法连接 IPv6 地址。排查发现 Docker 容器默认不支持 IPv6。
最近搬家,家里的 Self-Host 服务由于限制无法通过公网 IPv4 访问,就改用 IPv6 + DDNS 的方式提供公网域名访问。
切换完成后,立即收到云服务器上 Uptime Kuma 的告警,显示无法连接 IPv6 地址。排查发现 Docker 容器默认不支持 IPv6。
Colima 轻量、开源、免费 —— 在 Mac 上运行容器的最佳选择
git worktree 命令支持管理同一个 git 仓库的多个工作区1,每个工作区可检出不同分支/提交。每个工作区都像一个“轻量级的独立仓库”,但它们共享底层对象库,减少磁盘占用并加速切换。
同一分支在同一时刻只能在一个 worktree 中被检出。如果想在多个 worktree 同时基于同一分支进行试验,需要使用不同分支名,或者使用--detach直接检出到某个提交。
注意,
--detach会产生分离式 HEAD,后续的修改会丢失,一般不推荐使用,除非是仅看用于查看代码。

最近完成了博客从 Hexo 到 Hugo 的迁移,这篇文章记录了迁移的完整历程,包括技术选型、具体实施步骤、遇到的问题以及解决方案。

本文主要介绍Calcite 中的AST转执行计划。关系代数最早由E. F. Codd在1970年的论文A Relational Model of Data for Large Shared Data Banks中提出, 是关系型数据库查询语言的基础, 也是查询优化技术的理论基础。 在Calcite内部, 会将SQL查询转化为一颗等价的关系算子树, 并在此基础上进行查询优化. 通用的关系代数理论可以参考之前的文章形式化关系查询语言, 接下来介绍在Calciate中的实现。
本文主要介绍Calcite 中的SQL Validator。Calcite 通过 SQL 校验器实现 SQL 绑定,SQL 校验器所需的 Catalog 信息,在深入理解 Apache Calcite Catalog 中已经做了详细的介绍。
SQL 绑定主要的作用是将 SQL 解析生成的 AST 和数据库的元数据进行绑定,从而生成具有语义的 AST。SQL 绑定会通过自底向上的方式遍历 AST,对抽象语法树中的节点进行绑定分析,绑定的过程中会将表、列等元数据附在语法树上,最后生成具有语义的语法树 Bounded AST。
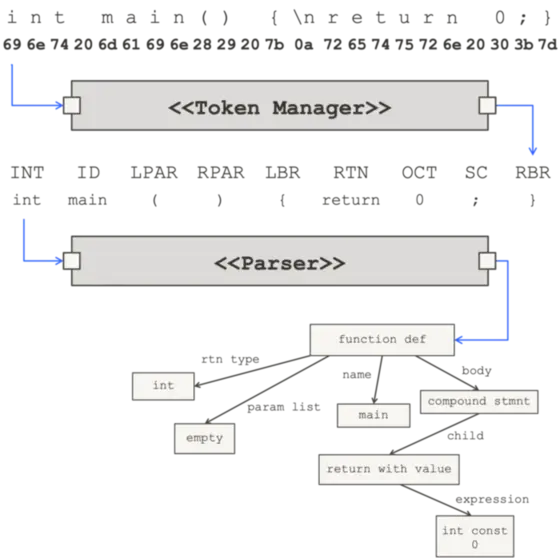
Calcite 中的SQL Parser 使用JavaCC 实现。JavaCC 在前面的博客中有过介绍, 本文就不赘述了。本文主要介绍Parser。

JavaCC的词法解析被转化为一组词法状态,每个状态都有一个唯一的标识符用于命名。Token Manager(生成的代码)在运行时总是处于状态之一,默认的一个词法状态是DEFAULT。当Token Manager初始化时,默认情况下是以DEFAULT状态开始。也可以在Token Manager 构造时,指定起始词法状态1。
上一篇文章我们简单介绍了 JavaCC的语法和使用。本文将以实现一个计算器为例,介绍JavaCC 在实际代码中的使用。
JavaCC 是 java 生态中常用的Parser Generator。特征如下:
JavaCC的工作流程如下: